





Bienvenue dans le monde passionnant de l’électronique et de la programmation ! Si vous êtes curieux de découvrir comment donner vie à un moteur pas à pas en utilisant Arduino, vous êtes au bon endroit. Dans cet article, nous allons explorer étape par étape comment connecter, programmer et contrôler un moteur pas à pas à l’aide d’un Arduino. Que vous soyez novice en électronique ou que vous ayez déjà quelques connaissances, suivez-nous pour une aventure captivante où vous transformerez des lignes de code en mouvements concrets. Préparez-vous à plonger dans l’univers palpitant de la robotique et de l’automatisation avec ce guide accessible, conçu spécialement pour les esprits curieux, âgés de 15 ans et plus !
Matériel requis :
- Arduino (avec câble USB)
- Moteur pas à pas
- Driver de moteur pas à pas (par exemple, le module A4988)
- Breadboard et fils de raccordement
- Alimentation externe pour le moteur pas à pas (si nécessaire)
Étapes :
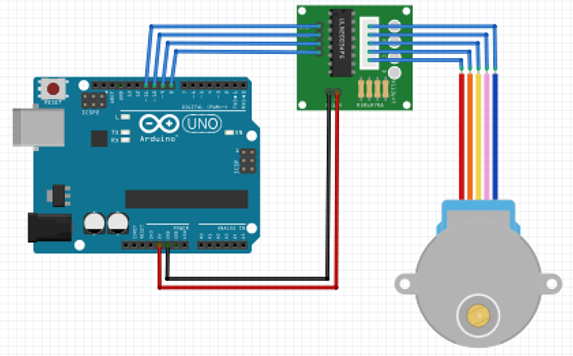
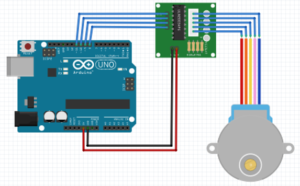
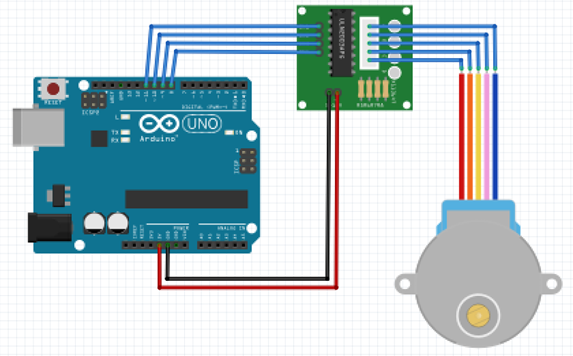
- Connexion du moteur au driver :
- Branchez les fils du moteur aux bornes appropriées du driver (consultez la documentation du moteur pour connaître les couleurs des fils).
- Connectez le driver au breadboard.
- Connexion du driver à l’Arduino :
- Connectez les broches STEP, DIR et GND du driver à des broches numériques de l’Arduino.
- Connectez la broche ENABLE du driver à une broche numérique, et assurez-vous de la connecter à une source de tension appropriée (5V).




- Alimentation du moteur :
- Connectez l’alimentation externe au driver et assurez-vous que la tension est adaptée au moteur.
- Programmation Arduino :
- Installez le logiciel Arduino sur votre ordinateur.
- Écrivez un programme simple dans l’IDE Arduino pour contrôler le moteur pas à pas. Utilisez les bibliothèques Stepper ou AccelStepper pour faciliter la programmation. Exemple de programme :
#include <AccelStepper.h>
AccelStepper stepper(1, 9, 8); // Utilise les broches 9 et 8 pour STEP et DIR
void setup() {
// Initialisation du moteur
stepper.setMaxSpeed(1000);
stepper.setSpeed(500);
}
void loop() {
// Fait tourner le moteur d'un tour
stepper.move(200);
stepper.runToPosition();
delay(1000); // Attendez une seconde avant la prochaine rotation
}- Téléversement du programme :
- Connectez l’Arduino à l’ordinateur via le câble USB.
- Téléversez le programme dans l’Arduino en cliquant sur le bouton « Téléverser ».
- Observation :
- Observez le mouvement du moteur en fonction du programme. Vous pouvez ajuster les valeurs pour expérimenter différentes vitesses et directions.
Pour contrôler un moteur pas à pas à l’aide de la bibliothèque AccelStepper.h, suivez ces étapes de base. Assurez-vous d’avoir inclus la bibliothèque au début de votre code Arduino avec la déclaration #include <AccelStepper.h>.
- Créez une instance de la classe
AccelStepper:
- Déclarez une instance de la classe
AccelStepperen précisant le type de moteur que vous utilisez et les broches de contrôle. Par exemple, si vous utilisez un moteur bipolaire avec quatre broches de contrôle, vous pouvez utiliser quelque chose comme :#include <AccelStepper.h> // Crée une instance de AccelStepper avec un moteur bipolaire à 4 broches (pin1, pin2, pin3, pin4) AccelStepper stepper(AccelStepper::DRIVER, 8, 9, 10, 11); - Assurez-vous de remplacer les numéros de broches (8, 9, 10, 11 dans cet exemple) par les broches réelles que vous utilisez.
- Configurez le moteur:
- Définissez la vitesse maximale et l’accélération du moteur. Vous pouvez le faire dans la fonction
setup()de votre programme. Par exemple :void setup() { // Configure le moteur stepper.setMaxSpeed(1000.0); // Définir la vitesse maximale en étapes par seconde stepper.setAcceleration(500.0); // Définir l'accélération en étapes par seconde par seconde }
- Contrôlez le moteur dans la boucle principale (
loop()):
- Dans la boucle principale de votre programme, appelez la fonction
stepper.run()pour mettre à jour la position du moteur en fonction de sa vitesse actuelle. Assurez-vous d’appeler cette fonction fréquemment pour maintenir un contrôle précis.void loop() { // Met à jour la position du moteur stepper.run(); }
- Effectuez des mouvements:
- Utilisez les différentes fonctions de la bibliothèque pour déplacer le moteur selon vos besoins. Par exemple, pour déplacer le moteur de 2000 étapes en avant, vous pouvez utiliser :
void loop() { // Déplace le moteur de 2000 étapes en avant stepper.move(2000); // Met à jour la position du moteur stepper.run(); } - Assurez-vous d’appeler
stepper.run()suffisamment souvent pour que le moteur se déplace correctement.
C’est un exemple très simple pour vous donner une idée générale. Vous pouvez ajuster la vitesse, l’accélération et les mouvements en fonction de vos besoins spécifiques. N’hésitez pas à consulter la documentation officielle de la bibliothèque pour plus d’informations sur les autres fonctions disponibles : AccelStepper Library Reference.
Fonctionnement des moteurs pas à pas:
Les moteurs pas à pas sont des dispositifs électromécaniques qui convertissent des signaux électriques en mouvements discrets et précis. Contrairement aux moteurs à courant continu traditionnels, les moteurs pas à pas avancent par incréments fixes, appelés « pas », d’où leur nom. Leur fonctionnement est basé sur le principe de l’électromagnétisme et de l’aimantation séquentielle.
Voici une explication du fonctionnement général des moteurs pas à pas :
1. Structure de Base
Les moteurs pas à pas sont composés d’un rotor (partie mobile) et d’un stator (partie fixe). Le rotor peut prendre différentes formes, mais souvent, il est constitué d’un aimant permanent ou d’une série d’aimants. Le stator est équipé de bobines électromagnétiques.
2. Bobines du Stator
Le stator comporte généralement plusieurs enroulements de fil conducteur, appelés bobines. Ces bobines sont disposées de manière à entourer le rotor. Chaque bobine peut être alimentée séparément par un courant électrique.
3. Séquences de Bobinages
Le moteur pas à pas avance en faisant passer du courant à travers les bobines du stator de manière séquentielle. Les combinaisons de bobines activées déterminent la direction et le nombre de pas effectués par le rotor.
4. Principe de la Commutation
Le moteur pas à pas peut fonctionner selon deux principes de commutation principaux : unipolaire et bipolaire.
- Unipolaire : Les bobines du stator sont enroulées autour d’un noyau magnétique et comportent un point commun (centre-tap). L’activation des bobines se fait en appliquant un courant positif ou négatif à la bobine par rapport au point commun. Cela crée un champ magnétique qui attire le rotor.
- Bipolaire : Les bobines du stator n’ont pas de point commun. L’activation des bobines se fait en inversant le courant dans la bobine. Cela crée également un champ magnétique qui attire le rotor.
5. Commande par Séquences
Pour faire avancer le rotor, les bobines du stator sont activées dans une séquence particulière. Les séquences les plus courantes sont la séquence « Wave Drive », « Full Step », « Half Step », etc. Chaque séquence correspond à un certain nombre de pas du moteur.
6. Contrôle des Pas
Le contrôle des moteurs pas à pas est généralement effectué par un contrôleur spécialisé ou par un microcontrôleur tel que l’Arduino. La bibliothèque AccelStepper.h, par exemple, permet de contrôler le moteur pas à pas de manière précise en fournissant des fonctions pour définir la vitesse, l’accélération et la position cible.
7. Avantages et Applications
Les moteurs pas à pas offrent un positionnement précis, une fiabilité élevée, et ne nécessitent pas de rétroaction pour déterminer la position. Ils sont utilisés dans une variété d’applications telles que les imprimantes 3D, les machines-outils CNC, les scanners, les robots industriels, les caméras, etc.
En résumé, le fonctionnement des moteurs pas à pas repose sur l’activation séquentielle de bobines du stator pour créer un champ magnétique qui fait avancer le rotor par pas discrets. Cette précision de mouvement en fait des composants essentiels dans de nombreux domaines où la précision et la fiabilité sont cruciales.