







Vous avez surement entendu parler des servomoteurs, ou même vous envisagez de les utiliser dans l’un de vos projets d’électronique, dans ce chapitre on va découvrir le principe de fonctionnement des servomoteurs, comment bien choisir son servomoteur et comment les commander via une carte arduino. Et pour finir en beauté une petite démonstration.
- Qu’est-ce qu’un servomoteur ?
- Commander son servomoteur !
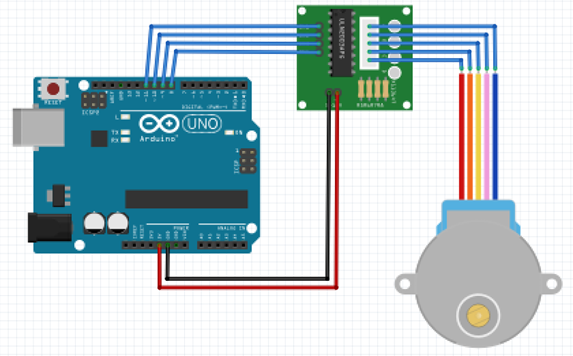
- Arduino et servomoteur
Qu’est-ce qu’un servomoteur :
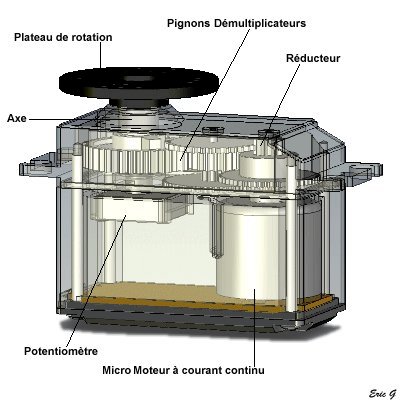
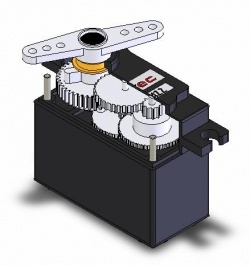
Pour faire simple, un servomoteur est un moteur à courant continu qui possède deux partie, une partie mécanique avec des engrenages, comme vous le voyez sur la photo en dessous, et une partie électronique de commande (d’où le nom « servo ») qui permet de commander le moteur à courant continu pour le faire tourner avec une grande précision.
Principe de fonctionnement :
Tout a d’abord commençant par décrire leur fonctionnement, un servomoteur n’est capable de tourner que pour un angle précis, par exemple, la plupart des servomoteurs dans le marché ne sont capable que de faire une rotation de 180° (ou 240° au maximum) en revanche il existe d’autres modèles qui sont capable de faire un tour complet (360°), mais pas plus d’un tour. Mais alors à quoi sert un moteur qui ne peut pas tourner normalement ?
Utilisations des servomoteurs :
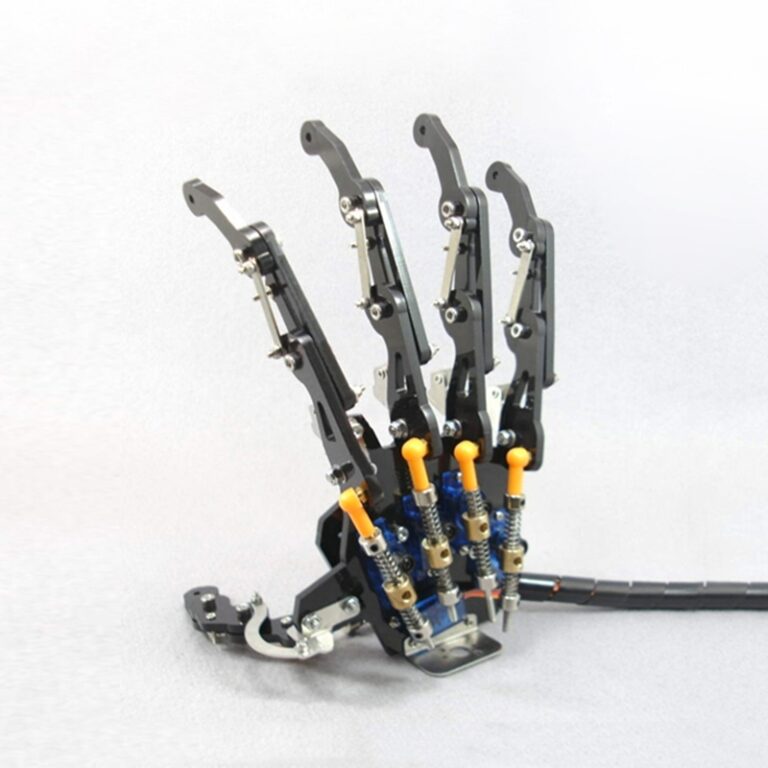
Comme vous l’avez constaté ce type de moteur ne peut pas faire avancer une voiture ou un robot, en effet leur utilisation principale est d‘effectuer des mouvements et des rotations précises, ce qui est primordiale pour guider votre robot ou pour lever un bras à une position bien déterminée.
en plus d’une rotation avec un angle précis, ce type de moteur est capable de se rappeler de sa position et de la conserver et ce jusqu’à nouvel ordre, en effet ce type de moteur à un repère qu’il lui permet de se positionner selon la commande reçue, par exemple l’état initial correspond à l’angle 0° donc à chaque fois qu’on l’alimente et s’il ne reçoit pas de commande, il va se positionner à cet angle automatiquement, ensuite si on veut le faire tourner à une position précise, par exemple à une angle de 20°, il va se positionner à cette position et il va conserver sa position même si on essaye de le tourner avec notre main. Cette fonction s’avère très utile, par exemple pour lever un bras ou un objet et maintenir sa position pour un bon moment et sans lui envoyer la commande à chaque instant.
Une autre différence avec les moteurs ordinaires, c’est qu’un moteur à courant continu ne s’arrête jamais à tourner tant qu’il est alimenté par le courant électrique. Les servomoteurs ont l’avantage de n’exécuter que les ordre reçus.






+ There are no comments
Add yours