






Mode de fonctionnement
Le fonctionnement et la commande du bras robotique s’effectue suivant cinq modes de fonctionnement différents
- Mode 1 :
En indiquant les coordonnées de l’objet à atteindre, le bras va attraper l’objet indiqué et le déplacer vers un autre point qu’on peut définir ses coordonnées préalablement.
La communication avec le robot se fait via un clavier et écran LCD (20×4).
- Mode 3 :
La commande du bras robotique se fait à l’aide d’un joystick pour faciliter la commande.
- Mode 5 :
Mode de fonctionnement automatique :
Quand un objet est dans le territoire du bras (sous forme d’un anneau de rayon extérieur = 35 cm et un rayon intérieur de rayon 15cm), le bras va détecter sa présence
Structure du bras robotisé
Pour concevoir, simuler ou commander un robot, il est nécessaire, entre autres, de disposer des modèles du mécanisme. Plusieurs niveaux de modélisation sont possibles. Ces derniers dépendent des spécifications du cahier des charges de l’application envisagée : il en découle des modèles géométriques, cinématiques et dynamiques à partir desquels peuvent être engendrés les mouvements du robot, ou bien des modèles statiques qui décrivent les interactions du mécanisme avec son environnement. L’obtention de ces différents modèles n’est pas aisée, la difficulté variant selon la complexité de la cinématique de la chaîne articulée. Entrent en ligne de compte le nombre de degrés de liberté, le type des articulations mais aussi le fait que la chaîne peut être ouverte simple, arborescente ou fermée.
L’objectif de ce projet est de concevoir un bras robot capable de manipuler des objets et les déplacer d’un point à un autre, cependant le bras robot doit être le plus léger possible, précis dans ses mouvements, stable dans son fonctionnement et avec un coût le plus faible possible.
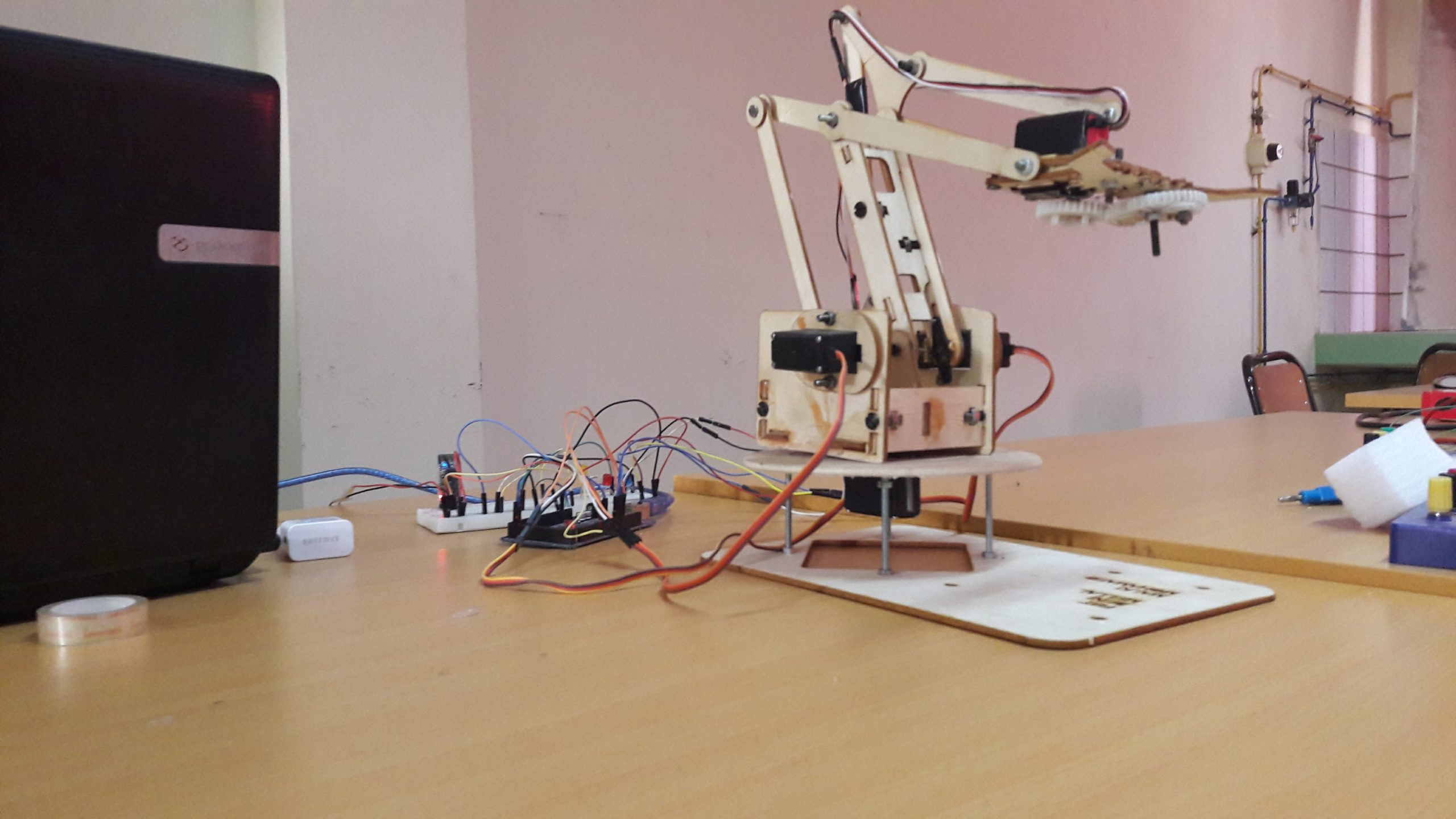
Partie bras robot
Le bras robot est un bras à 4-axes parallèles, piloté par des servomoteurs standard et contrôlé par une carte Arduino. La structure du bras robot conçu et réalisé dans ce projet, a été inspirée du bras robot industriel ABB PalletPack IRB 460. Vu la simplicité de sa structure et l’efficacité et la précision de son fonctionnement. En effet le plus grand avantage de ce type de bras robot à mécanisme parallèle, est que la plus grande partie de sa masse est concentré sur la base, ce qui rend le robot beaucoup plus stable et léger, et par conséquence de permettre, d’une part, à la partie supérieure du bras de réagir d’une manière plus rapide et d’autre part, d’utiliser des servomoteurs avec un couple moindre et avec une faible consommation d’énergie.
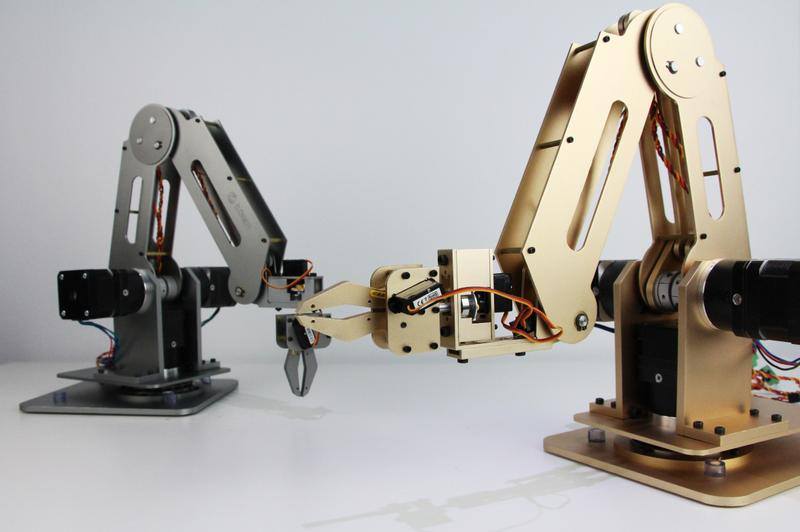
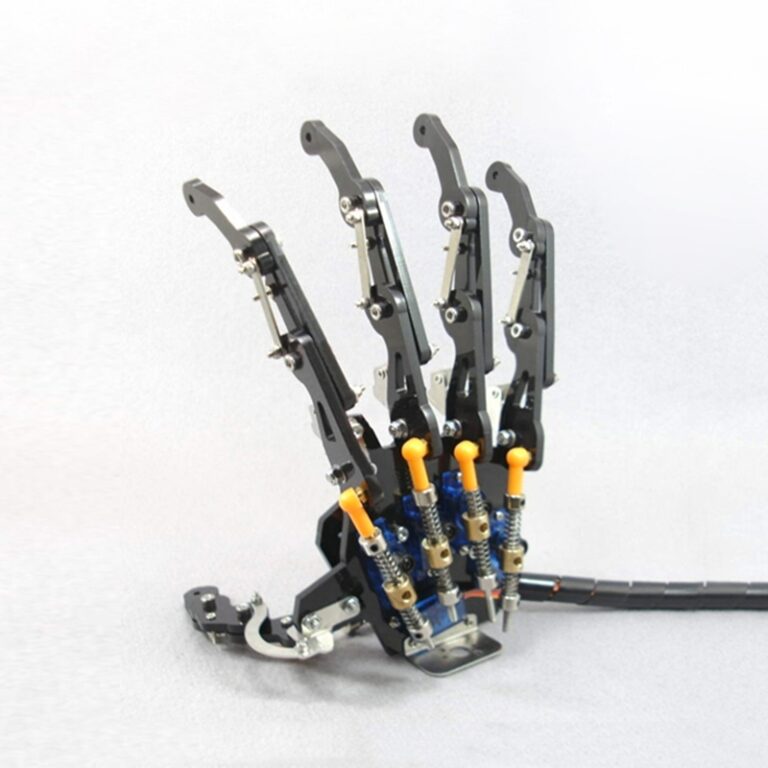
La modélisation des pièces constituant Notre bras robot est faite avec le logiciel de conception et modulation SolidWorks, ces pièces qui sont fabriqués en bois ont été découpées au laser grâce à une machine CNC. Le bras robot à 4 degrés de liberté est contrôlé avec une carte Arduino Méga 2500. Trois servomoteurs montés sur la base contrôlent le mouvement principal du bras et le mini servo monté sur la pince a pour rôle d’ouvrir ou de fermer la pince ce qui permet d’attraper les objets. La base du bras est toujours maintenue parallèle au sol. Un module Bluetooth HC-05 utilisé en mode master afin d’établir une communication et un échange de données avec la manette à distance qui peut aller jusqu’à 100m s’il n’y a pas d’obstacle entre la manette et le bras robot.
Partie manette
La manette a pour rôle de contrôler les mouvements du bras à distance et d’afficher l’état du bras robot à l’utilisateur grâce à un afficheur LCD, la manette est constituée d’une carte Arduino UNO, un joystick, un potentiomètre, un module Bluetooth HC-06 et un afficheur LCD plus une alimentation de 5v
Choix des composantes
Le matériel nécessaire pour le fonctionnement et le contrôle du bras robotisé est le suivant :
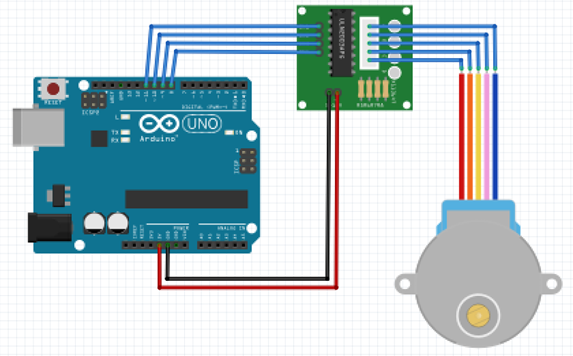
- Deux carte arduino : une pour la partie manette et l’autre pour la commande des servomoteurs.
- Un afficheur LCD qui va servir comme une interface visuelle et de communication avec l’utilisateur.
- Un joystick afin de permettre à l’utilisateur de commander facilement le bras
- Un potentiomètre et 6 LED de signalisation
- Quatre servomoteurs assurant le mouvement du bras robotisé
- Un module Bluetooth HC-05 fonctionnant en mode maître
- Un module Bluetooth HC-06 fonctionnant en mode esclave
- Deux sources d’alimentation assurant une tension 5v et un courant de 2amp






+ There are no comments
Add yours